

 联系我们
联系我们


导航模式
激光导航主要有两种方式:
一、反光板式激光导航

二、轮廓式激光导航

一、反光板式激光导航
基于反光板的激光导航是通过激光发射器连续不停的发射激光脉冲,由旋转光学机构将激光脉冲按一定角度间隔(角度分辨率)发射向扫描角度内的各个方向而形成一个以径向坐标为基准的二维扫描面。激光雷达通过识别扫描范围内的物体表面反射率,来识别激光反光板的位置信息(X,Y),再通过***少三个反光板的位置计算出激光雷达所在的AGV的位置和姿态信息(X,Y,a)。

*以径向坐标为基准的二维扫描面

*反光板至少要三个
Q1:什么是反光板呢?
反光板的内部是三棱镜结构,可以实现入射光的同路反射。反光板的反射率远远大于普通物体的表面。

所以激光雷达是可以通过表面反射率信息从自然目标中识别出反光板的。

*反光板的反射率远远大于普通物体的表面



*通过表面反射率信息从自然目标中识别出反光板
Q2:如何通过反光板的位置计算激光雷达所在的AGV的位置和姿态信息呢?




Q3:西克的哪款产品能够支持激光反光胶贴导航呢?



二、轮廓式激光导航
基于轮廓信息(自然目标)的激光导航是通过激光雷达扫描周围轮廓信息(距离,角度,被测物体反射率),并通过SLAM等算法实现:
路标检测及地图匹配
定位及建立地图
障碍物检测等功能


Q4:西克有哪些产品可以实现激光轮廓导航呢?



Q5:西克的激光雷达在轮廓式激光导航中有哪些优势呢?
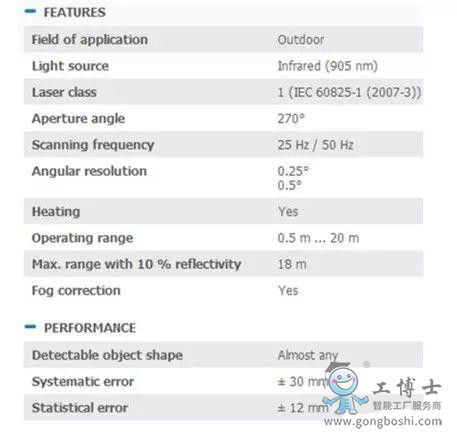
以LMS1系列为例讲解

现阶段激光轮廓导航主要应用于现场环境不适用辅助导航标签的环境中,比如:扫地机器人,服务机器人,无车驾驶车等等。
